KOSMONAUTYKA
Opóźnia się pierwszy lot marsjańskiego drona. Powodem anomalia
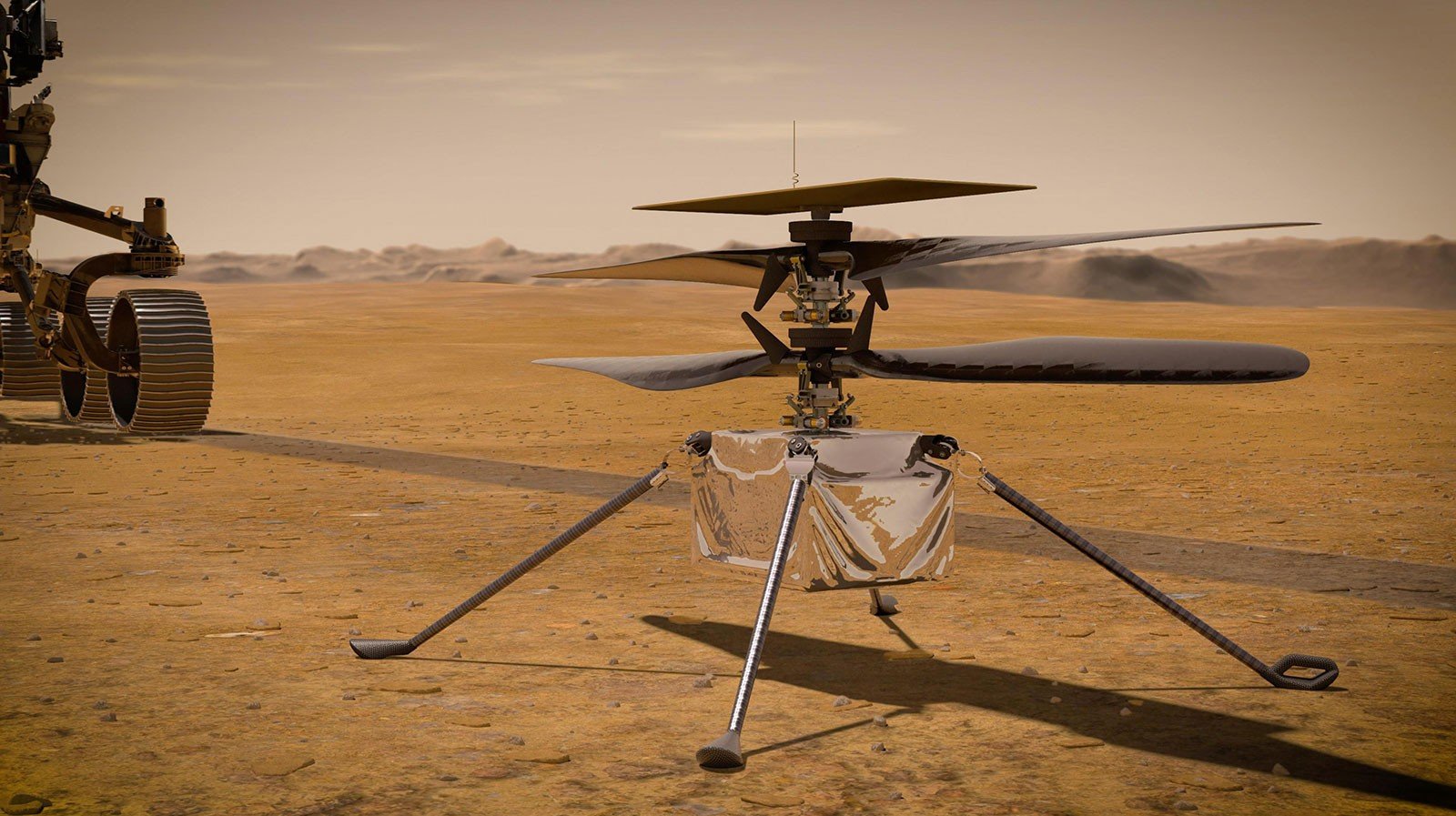
![Wspólne zdjęcie łazika Perseverance i miniaturowego wiropłatu Ingenuity. Fot. NASA/JPL-Caltech [mars.nasa.gov]](https://cdn.defence24.pl/2021/04/14/1024x576px/mNNo4amEM42rGzXf82mx6ytyqz6V1E6cSZ2C7JCU.0xfo.jpg)
Z powodu wystąpienia problemu z wykonaniem sekwencji komend podczas testowego rozruchu napędu oraz koniecznej aktualizacji oprogramowania sterującego, amerykańska agencja kosmiczna NASA ponownie przesunęła inauguracyjny lot miniaturowego wiropłatu Ingenuity na Marsie. Pierwszy w historii lot drona w atmosferze innej planety był ostatnio zapowiadany na 14 kwietnia, jednak ta data jest już nieaktualna.
Ingenuity to nazwa niewielkiego wiropłatu – bezzałogowego drona, który został przetransportowany na Marsa wraz z łazikiem Perseverance (złożony w jego podwoziu). Misja Perseverance wylądowała na Czerwonej Planecie 18 lutego br. Po przeprowadzonym na początku kwietnia opuszczeniu miniaturowego śmigłowca na twardy grunt i pierwszych statycznych testach rozruchowych, zdawało się, że wszystko jest na dobrej drodze do jego terminowego uruchomienia. Wkrótce rozpoczęto też wstępne testy silnika oraz kolumny wirnika nośnego (złożonego z dwóch przeciwskrętnych śmigieł kompozytowych) - początkowo w tempie 50 obrotów na minutę, a potem nawet 2400 obrotów w ciągu minuty.
Pierwszy lot drona zapowiadano wstępnie na termin nie wcześniejszy niż 8 kwietnia. W miarę zbliżania się próby, NASA zakomunikowała jako konkretny jej dzień datę 11 kwietnia. Niebawem jednak start odłożono na co najmniej 14 kwietnia, wspominając o pewnych anomaliach, które poskutkowały potrzebą dodatkowego sprawdzenia systemu. Z kolei w poniedziałek 12 kwietnia ogłoszono, że opóźnienie będzie jeszcze poważniejsze, nie podając już konkretnego terminu. Tak pozostaje do tej chwili - nowa data ma zostać podana najwcześniej w przyszłym tygodniu.
W kwestii zadeklarowanej anomalii, specjaliści NASA wyjaśnili, że problem z wykonaniem sekwencji komend wystąpił podczas testu pracy wirnika przy wyższych prędkościach obrotu, co spowodowało odłożenie decyzji o locie. Sekwencja sterowania testem nie mogła zostać doprowadzona do końca. W związku z tym opracowano już poprawkę oprogramowania niwelującą błąd w sekwencji poleceń zidentyfikowany 9 kwietnia. Za najlepsze rozwiązanie uznano finalnie ogólną aktualizację i reinstalację oprogramowania. Testy nowej wersji, a potem jej wgranie do komputera Inguenity mają nastąpić w najbliższych dniach.
Niezależnie od tego, NASA zapewnia, że miniaturowy wiropłat jest bezpieczny i w dobrym stanie. "Funkcje krytyczne, takie jak zasilanie, komunikacja i kontrola termiczna, utrzymują właściwe i stabilne odczyty" - podano w komunikacie NASA z 12 kwietnia. Podczas, gdy zespół Ingenuity wykonuje pracę nad wyeliminowaniem swojej przeszkody, Perseverance będzie kontynuować badania i kalibrację swojego zestawu instrumentów - trwają już m.in. przygotowania do ważnego testu demonstratora technologii uzyskiwania tlenu z atmosferycznego dwutlenku węgla (MOXIE).
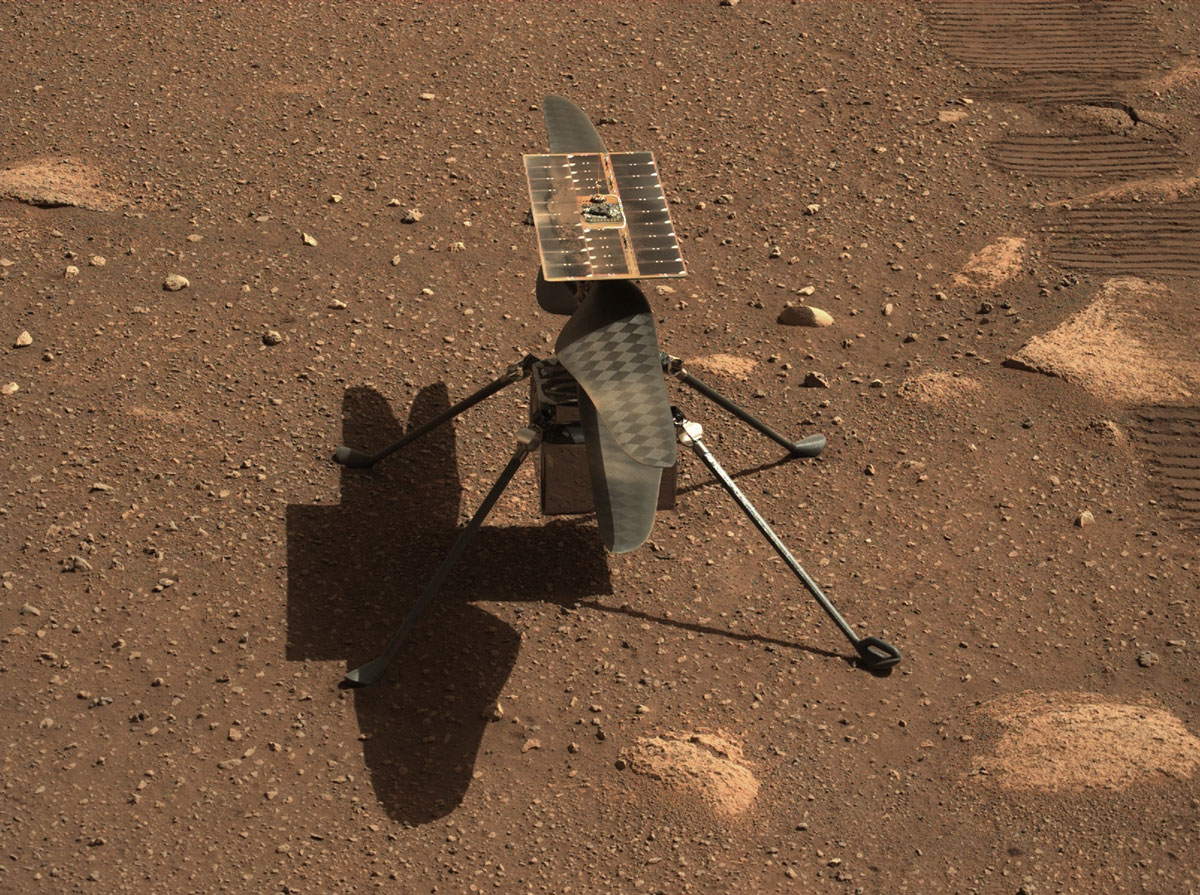
Podczas organizacji lotu marsjańskiego drona inżynierowie NASA muszą brać pod uwagę kilka czynników. Ingenuity nie może latać w nocy, bowiem w nawigowaniu polega na obserwacji gruntu przez kamery. Kolejną sprawą jest konieczność koordynacji tego eksperymentu z badaniami prowadzonymi przez łazik Perseverance. Sześciokołowy pojazd jest wyposażony w rozbudowany system wizyjny, umożliwiający obserwowanie drona (NASA prezentowała już zdjęcia, na których widać m.in. drona pozostawionego na marsjańskim gruncie), a więc zespół odpowiedzialny za lot drona musi zgrać swój harmonogram z zespołami odpowiedzialnymi za inne elementy misji Perseverance. Są też momenty, gdy Perseverance jest zajęty transmisją danych do sond i satelitów okołomarsjańskich (które potem przesyłają je na Ziemię).
W trakcie lotu dron będzie zużywał dużo energii. Bateria, która zasila dwa główne silniki oraz napęd dla śmigieł Ingenuity, musi radzić sobie ze skokami mocy, gdy dron będzie zmagał z wiatrem i jego podmuchami. Musi być utrzymywane stałe napięcie, aby uniknąć problemów. Natomiast po zimnej marsjańskiej nocy w baterii nie pozostaje wiele energii i gdy się w dzień nagrzeje, jest doładowywana przez panele słoneczne. Z tego powodu Ingenuity nie może też lecieć wcześnie rano. Z kolei zbyt późny lot może wyczerpać baterie bez szans na doładowanie ich przed nocą. Jako najlepszy czas NASA wskazuje więc środek dnia lub popołudnie.
Trzeba przy tym brać pod uwagę też wiejące na Marsie wiatry. Lot Ingenuity testowano w symulowanych warunkach na podstawie modeli komputerowych, w tym na przykład na „ścianie wiatru” skonstruowanej w laboratorium testowym. Nie udało się jednak przetestować wszystkich możliwych warunków, które mogą wystąpić na Marsie. Największe ryzyko jest przy starcie i lądowaniu. Dlatego przy pomocy czujników Perseverance śledzone są na bieżąco warunki pogodowe i generowane prognozy pogody.
Źródło: NASA/PAP