











- WIADOMOŚCI
ESA przeprowadziła testy polskiego chwytaka do łapania satelitów
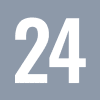
Chwytak robotyczny PIAP zaprojektowany na potrzeby misji ESA e.Deorbit, fot. Andrzej Hładij/Space24.pl 
Satelita Envisat, ilustracja: ESA 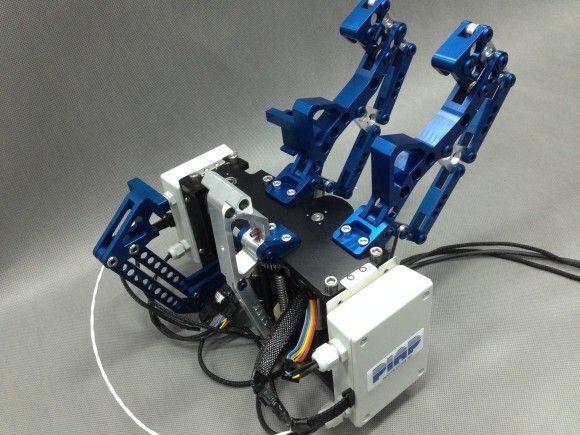
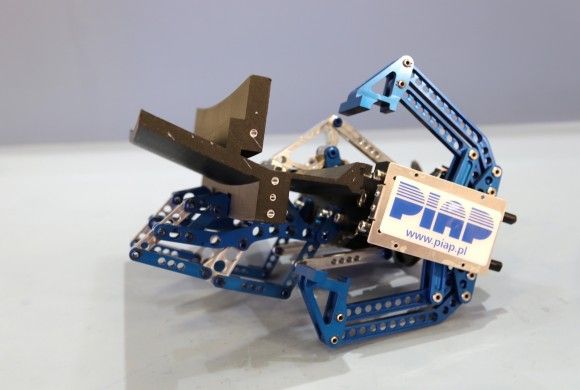
Fot. PIAP
W laboratorium robotycznym ESA symulującym brak grawitacji zakończyła się kampania testowa chwytaka do przechwytywania niesprawnych satelitów. Tym samym Przemysłowy Instytut Automatyki i Pomiarów (PIAP) zakończył realizacje kontraktu na potrzeby misji e.Deorbit.
Tematyka śmieci kosmicznych z roku na rok otrzymuje coraz wyższy priorytet wśród różnych aktorów sektora kosmicznego, szczególnie w Komisji Europejskiej i Europejskiej Agencji Kosmicznej. Ta ostatnia powołała specjalny program „Clean Space”, koordynujący rozwój szerokiego wachlarza technologii umożliwiający w przyszłości obniżenie lub wręcz zatrzymanie ich przyrostu.
Flagową inicjatywą w ramach Clean Space jest misja e.Deorbit. W 2023 na niską orbitę okołoziemską zostanie wysłany satelita serwisowy, który przechwyci i usunie niedziałającego od 2012 roku największego satelitę obserwacyjnego jaki kiedykolwiek został zbudowany Envisat. Pojazd kosmiczny waży ponad 8 ton.

Kluczowym dla misji e.Deorbit jest manewr końcowego zbliżenia i przechwycenia satelity. Ponieważ Envisat posiada bardzo duże panele słoneczne oraz obraca się w sposób niekontrolowany, prawidłowe przechwycenie jest znaczącym wyzwaniem. Kluczową cechą urządzenia przechwytującego jest szybkość i wysoka tolerancja mechanizmu na błędy położenia. Obie zdolności posiada chwytak PIAP.
Każdy satelita, czy to Envisat, czy satelity telekomunikacyjne, czy nawigacyjne są z zewnątrz wręcz najeżone szeregiem różnych urządzeń – antenami, kamerami, fotoogniwami, a dodatkowo są obłożone izolacją termiczną. Redukuje to do minimum liczbę punktów, za które mógłby zaczepić się chwytak. Na szczęście każdy większy satelita posiada tzw. adapter, za który pozwala na jego mocowanie do rakiety nośnej. Nasz chwytak wykorzystuje właśnie ten element do zaczepienia. Dodatkowo, co jest kluczowe zarówno dla misji e.Deorbit, jak i jej następców - umożliwia bardzo szybki zacisk wokół obiektu przy bardzo dużych błędach wzajemnego położenia adaptera i chwytaka. Ponadto chwytak wyróżnia się dużą siłą zacisku, kluczową dla późniejszych manewrów,kiedy satelita serwisujący jest połączony z przechwyconym satelitą i chce zmienić ich wspólną orbitę chwytak wraz z ramieniem robotycznym służy do przenoszenia obciążeń z silnika deorbitujacego na satelitę serwisowanego.
W laboratorium mieszczącym się w Centrum Badań i Rozwoju Technologii Kosmicznych ESA (ESTEC) w Noordwijk funkcjonalność chwytaka PIAP była szczegółowo oceniana przez ekspertów robotyki kosmicznej oraz od misji e.Deobit. Na powierzchni o bardzo niskim współczynniku tarcia i wysokiej płaskości umieszczano na poduszce powietrznej dwie platformy, co odzwierciedlało warunki częściowego braku grawitacji. Na jednej platformie, symulującej satelitę przechwytującego, zainstalowany był chwytak, na drugiej, symulującej niedziałającego satelitę, pierścień adaptera. Przy różnych konfiguracjach obu platform weryfikowano zakres i warunki, w jakich chwytak jest w stanie przechwycić cel.
Przy okazji rozmowy o technologii chwytaka dla misji e.Deorbit warto wspomnieć, że wkrótce będzie ona miała zastosowanie w dużo ciekawszych obszarach rynku do których należy serwisowanie satelitów na orbicie, uzupełnianie paliwa, a także różne metody wydłużania czasu ich działania. Będzie to nowy segment rynku, do wejścia na który PIAP już teraz się przygotowuje.
Projekt chwytaka został opracowany i wykonany w ramach programu Polish Industry Incentive Scheme.












