











- WIADOMOŚCI
Polski robot podwodny pojedzie na zawody do USA [Wideo]
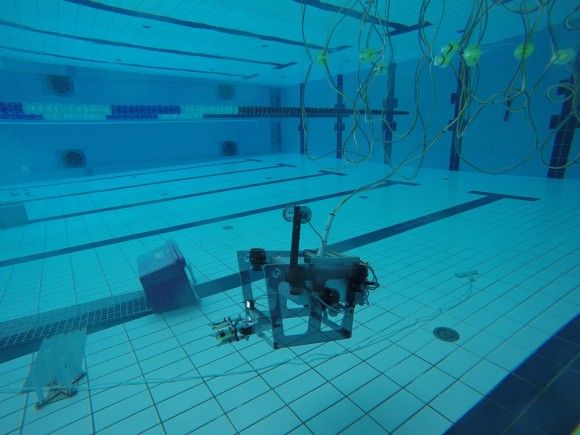
robot podwodny AHTI, fot. SKN Robotyki Podwodnej via Facebook 
Główny basen NASA Neutral Buoyancy Laboratory w Houston w Teksasie, gdzie odbędą się zawody MATE 2016, fot. Ben_pcc/Wikipedia
AHTI czyli robot podwodny typu ROV zbudowany w ramach Studenckiego Koła Naukowego Robotyki Podwodnej Politechniki Warszawskiej zakwalifikował się do międzynarodowych zawodów robotów podwodnych MATE 2016 , które odbędą się w dniach 23-25 czerwca 2016 r. w należącym do NASA Neutral Buoyancy Lab ulokowanym w pobliżu Centrum Lotów Kosmicznych imienia Lyndona B. Johnsona w Teksasie.
Robot AHTI typu ROV (Remotly Operated Vehicle) to bezzałogowa jednostka pływająca sterowana przewodowo, zdolna do wykonywania różnego rodzaju prac i pomiarów w zbiorniku wodnym. Sterowanie i odbiór sygnałów spod powierzchni wody dokonywane są w bazie naziemnej, z którą robot połączony jest kabloliną. Zespół napędowy robota stanowi sześć pędników składających się z silnika, śruby napędowej oraz tzw. dyszy Korta, która jest jednocześnie osłoną dla śruby i elementem zwiększającym ciąg pod wodą. Pędniki pozwalają na swobodny ruch robota w trzech płaszczyznach. Chwytak, umieszczony z przodu robota, pozwala mu na operowanie przedmiotami w wodzie oraz zapewnia bardzo dużą funkcjonalność całej konstrukcji. Dzięki dwóm kamerom umieszczonym na pokładzie, osoba sterująca robotem ma stały podgląd otoczenia robota. Dobrą widoczność zapewnia ledowe oświetlenie. Komputer pokładowy wraz ze sterownikami oraz całą elektroniką umieszczone są w aluminiowym kadłubie.
Zespół SKN Robotyki Podwodnej zaprojektował AHTI jako konstrukcję uniwersalną, która w przyszłości mogłaby znaleźć zastosowanie w wielu dziedzinach związanych z pracami podwodnymi, począwszy od przemysłu paliwowego, przez projekty badawcze, aż po ochronę środowiska. Specjalistyczne czujniki, w jakie studenci planują wyposażyć swojego robota, sprawią, że będzie on nadawał się do niemal każdego zadania, a modułowość tych elementów spowoduje, że ROV będzie mógł stać się jednostką wyspecjalizowaną, w zależności od zadania, jakie zostanie przed nim postawione.
AHTI ma pracować na głębokości nawet 12 metrów, gdyż takie są wymagania konkursowe. Ponieważ warunki na głębokości 10-12 metrów nie wymagają, aby cały robot był metalowy, dlatego maszyna zbudowana jest w dużej mierze z elementów wykonanych przy pomocy druku 3D. Ramy robota wykonane są z poliwęglanu, obudowy silników i oświetlenia z polimeru ABS, a tuby na kamery z akrylu.
Roboty biorące udział w tegorocznych zawodach MATE 2016 organizowanych przez organizację MATE – Marine Advanced Technology and Education muszą wykazać się wyjątkową wszechstronnością, ponieważ ROV będzie musiał wykonać nie tylko symulowane misje podwodne, takie jak odzyskiwanie sprzętu z dna Zatoki Meksykańskiej czy analizowanie próbek koralowców, ale także misję kosmiczną, jak chociażby badanie oceanu pod powierzchnią Europy, księżyca Jowisza.

Zawody MATE 2016 odbędą w dniach 23-25 czerwca 2016 r. w należącym do NASA Neutral Buoyancy Lab ulokowanym w pobliżu Centrum Lotów Kosmicznych imienia Lyndona B. Johnsona w Houston w Teksasie. Laboratorium wyposażone w duży basen o wymiarach 62 na 31 metrów o głębokości ponad 12 metrów wykorzystywane jest do szkolenia astronautów amerykańskiej agencji kosmicznej, a także testowania makiet pojazdów kosmicznych zarówno firm amerykańskich, jak i opracowanych w Japonii lub Europie.
SKN Robotyki Podwodnej zostało założone w grudniu 2015r. na wydziale Mechanicznym Energetyki i Lotnictwa Politechniki Warszawskiej przez trzech studentów: Tomasza Bartkowiaka, Andrzeja Daniluka, Marka Głuchowskiego. Dziś zespół pracujący nad robotem to siedem osób, w tym: trzech mechaników, dwóch elektroników, informatyk i osoba zajmująca się marketingiem i promocją. Opiekunem koła jest dr inż. Paweł Malczyk z Zakładu Teorii Maszyn i Robotów MEiL. Wielu członków SKN pracowało wcześniej nad różnymi projektami w innych kołach naukowych Politechniki Warszawskiej. Część z nich ma już także doświadczenia związane z robotyką podwodną.
Do zawodów pozostał jeszcze ponad miesiąc. Ten czas studenci planują przeznaczyć na stworzenie dokumentacji technicznej robota (jej dostarczenie jest wymogiem konkursu) oraz na prace nad udoskonaleniem konstrukcji. Ponadto zespół planuje zdobyć dofinansowanie do wyjazdu na zawody. Z jednej strony są prowadzone rozmowy m.in. z władzami Politechniki Warszawskiej, a z drugiej zespół planuje wystartować z kampanią na portalu crowdfundingowym „Polak Potrafi”. Suma potrzebna do zebrania to ok. 50 tys. zł na wyjazd 7-osobowej drużyny i 10 tys. zł na udoskonalenie robota. Należy podkreślić, że zespół robota AHTI jest pierwszą drużyną z Polski, która zakwalifikowała się na zawody MATE i jest to spore wyróżnienie.
Politechnika Warszawska wystawiła do tych zawodów także drugiego robota podwodnego – Trytona. Z powodu problemów technicznych ta konstrukcja nie przeszła jednak eliminacji do MATE 2016.
(PG)












