











- WIADOMOŚCI
NASA wyśle na Marsa mikrohelikopter?

Ilustracja: NASA Jet Propulsion Laboratory / jpl.nasa.gov 
Ilustracja: NASA Jet Propulsion Laboratory / jpl.nasa.gov
W ramach przygotowań do misji Mars 2020 odżywa pomysł wyposażenia nowego łazika NASA w lotny instrument rozpoznania terenowego. Koncepcji marsjańskiego drona nadano kształt ultralekkiego wiropłatu o dwóch współosiowych, przeciwbieżnych wirnikach nośnych. Zgodnie z obowiązującym zamysłem, mikrohelikopter ma być w pełni zdolny do pracy w atmosferze Czerwonej Planety.
Pierwsze wzmianki na temat możliwego wykorzystania w ramach misji Mars 2020 łazika wyposażonego w autonomiczne urządzenie latające pojawiły się jeszcze w styczniu 2015 roku. Od tamtego czasu pomysł zasilenia pojazdu marsjańskiego w latający system rozpoznania terenowego przybrał już formę pełnej koncepcji technologicznej, która zakłada stworzenie dedykowanego niewielkiego wiropłatu o dwóch współosiowych, przeciwbieżnych wirnikach nośnych. Zgodnie z obowiązującym zamysłem, mikrohelikopter ma ważyć około 1 kg i być w pełni zdolny do pracy w marsjańskiej atmosferze.
Działanie drona ma zapewnić łazikowi lepszą orientację w przestrzeni i pozwolić na pewniejsze poruszanie się po powierzchni Czerwonej Planety. Wśród praktycznych korzyści wymienia się przede wszystkim dokładniejszą identyfikację obiektów badawczych oraz nawet trzykrotne wydłużenie dziennych dystansów pokonywanych przez łazik. Głównym zadaniem mikrolotu ma być fotografowanie z górnego pułapu terenu otaczającego pojazd marsjański.
Aktualnie ustalanie tras łazików polega na danych ze zdjęć wykonywanych przez sondę Mars Reconnaissance Orbiter oraz kamery nawigacyjne samego pojazdu. Wiąże się to z pewnymi ograniczeniami, gdyż zasięg kamer zintegrowanych z łazikiem nie pozwala na planowanie drogi na dystansie przekraczającym 100 m. Rejestrator obrazu sondy MRO nie oferuje natomiast wystarczającej rozdzielczości, aby zapewnić bezpieczny przejazd w trudnym terenie.
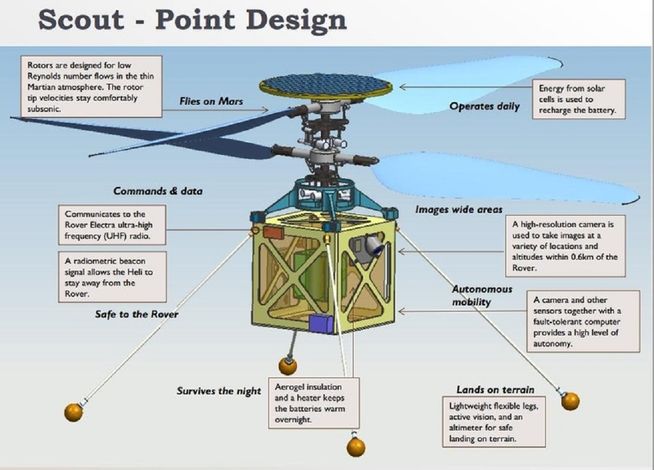
Projekt rozwijany pod nazwą Mars Helicopter Scout ma zaradzić wspomnianym problemom. Koncepcyjny pojazd latający ma kształt sześcianu ustawionego na elastycznej podstawie umożliwiającej bezpieczne lądowanie w marsjańskich warunkach. Centralnym elementem drona jest system napędowy złożony z dwóch przeciwbieżnych wirników. Na szczycie osi napędu ma być zamontowany niewielki panel słoneczny zasilający urządzenie i jego systemy. W ich skład wejdzie rejestrator obrazu, umożliwiający bieżącą transmisję danych do łazika.
MHS ma działać jako jednostka w pełni autonomiczna, na podstawie algorytmu umożliwiającego m.in. wybór bezpiecznego miejsca lądowania. Z przesłanych zdjęć tworzona miałaby być kompletna mapa terenu. Zgodnie z założeniami, w trakcie jednego dnia MHS będzie mógł przeprowadzić lot na dystansie 600 m i pułapie w granicach 10-100 m. Bateria mikrolotu byłaby ładowana w stanie spoczynku między lotami.
Czytaj też: NASA traci monopol na badania Marsa. Kiedy nowa sonda?












