











- WIADOMOŚCI
- KOMENTARZ
- OPINIA
Robotyzacja kosmosu. Od niskiej orbity po bezkresną głębię
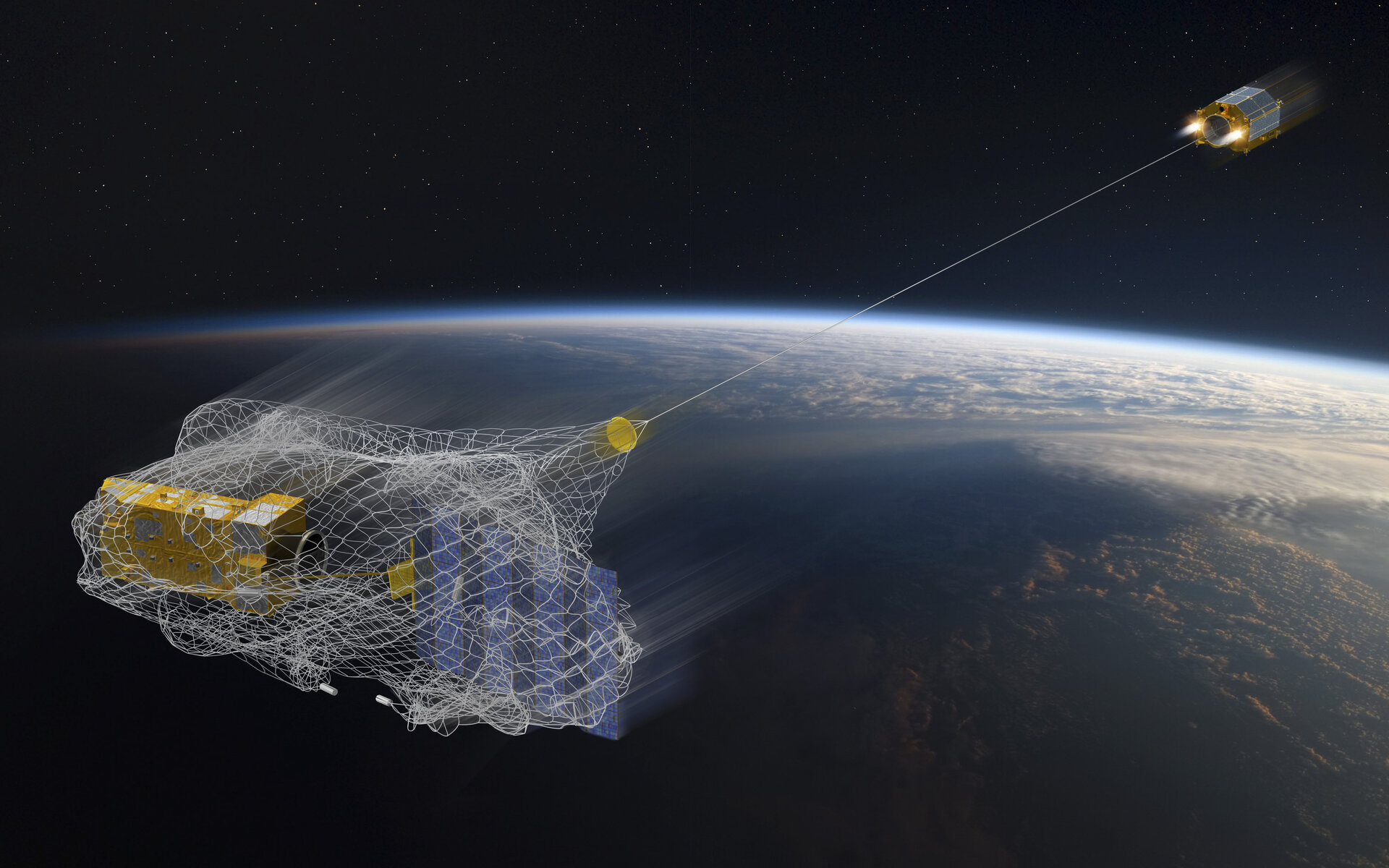
![Koncepcja działania misji e.Deorbit. Ilustracja: ESA–David Ducros [esa.int]](https://cdn.defence24.pl/2020/07/03/800x450px/NeDWqRJ2lePSLbq6k44Ea3sxK2saboXKkYehlwzl.xbjm.jpg)
Każdy z nas zna i rozumie znaczenie słowa „robot”. Określenie zostało spopularyzowane przez czeskiego pisarza Karela Čapka w jego słynnej sztuce „Rossumovi univerzální roboti” w 1921 roku, w kontekście sztucznej istoty zbudowanej na podobieństwo człowieka – by zastąpić go w pracy. Idąc dalej, termin „robot” pochodzi od czeskiego słowa „robota”, oznaczającego właśnie pracę. Z naukowego punktu widzenia roboty to maszyny, które mają odciążać ludzi od wykonywania ciężkich i niebezpiecznych zajęć – a nierzadko też takich, których człowiek nie byłby w stanie przeprowadzić ze względu na zabójcze warunki środowiskowe lub konieczność zapewnienia kosztownej dodatkowej ochrony. Stąd, roboty będą coraz częściej pionierami wypraw kosmicznych, przecierając kolejne szlaki w niegościnnej przestrzeni pozaziemskiej.
Roboty kosmiczne mogą znajdować mnogie i różnorodne zastosowanie w eksploracji kosmosu. Najbliższe orbicie okołoziemskiej i nieodległe we wdrażaniu - już zresztą rozwijane także w Polsce - są technologie związane z aktywnym usuwaniem tak zwanych śmieci kosmicznych (m.in. ostatnich stopni rakiet nośnych czy nieczynnych już satelitów, które pozostały na orbicie). Rozważane są różne sposoby ich usuwania, na przykład metodą opartą na zastosowaniu manipulatora zamontowanego na bezzałogowym satelicie przechwytującym. Na końcu takiego manipulatora zamocowany jest chwytak, który „łapie” kosmiczne pozostałości, a w kolejnym etapie usuwa je z orbity.
Przykład takiego zastosowania robotyki może stanowić misja e.Deorbit Europejskiej Agencji Kosmicznej (ESA), która miała być pierwszą na świecie misją demonstrującą możliwości aktywnego usuwania śmieci kosmicznych. Dzięki tej misji jeden z największych śmieci kosmicznych – niedziałający satelita Envisat – miał zostać deorbitowany.
Centrum Badań Kosmicznych PAN brało udział w misji e.Deorbit w fazie B1, w której zespół z CBK PAN prowadził m.in. prace związane z projektem chwytaka. CBK PAN również uczestniczyło w fazie konsolidacyjnej tej misji, w której naszym zadaniem było opracowanie układu sterowania manipulatorem i zweryfikowanie opracowanego układu sterowania w oparciu o symulacje numeryczne. Układ ten miał ograniczyć obciążenia występujące podczas zamykania mechanizmu zaciskowego na pierścieniu LAR. Niestety w 2018 roku ESA wycofała się z misji ze względów finansowych.
Innym rodzajem zastosowania robotów kosmicznych są misje serwisowe, mające za cel przedłużanie życia satelitów. Żywotność orbitującego satelity jest ograniczona ilością paliwa na pokładzie i awariami jego instrumentów. Pewne operacje tego typu w przeszłości odbywały się z udziałem wahadłowców, gdzie jednak działania odbywały się w przeważającej mierze z zaangażowaniem astronautów, którzy mieli pod bieżącą kontrolą funkcjonowanie wykorzystywanych robotycznych ramion. W tym roku jednak udany debiut na orbicie geosynchronicznej zanotował autonomiczny satelita serwisowy MEV-1, który 25 lutego z powodzeniem przechwycił nieczynnego satelitę Intelsat-901, by przywrócić go do działania jeszcze w kwietniu.
Czytaj też: Stephane Combes, ESA - rozwój robotyki i lekkich satelitów szansą polskiego przemysłu [Space24 TV]
Kolejnym oczekiwanym zastosowaniem robotów kosmicznych są misje związane z montażem dużych struktur na orbicie. Obecnie takie struktury (wyjątkiem jest Międzynarodowa Stacja Kosmiczna) są budowane na Ziemi, a następnie wysyłane na orbitę w jednym kawałku. Zatem rozmiar struktury jest ograniczony rozmiarem osłony ładunku. Ich dopuszczalna masa również jest ograniczona.
Aby pokonać te ograniczenia, duże struktury kosmiczne (np. duże teleskopy lub elektrownie orbitalne) powinny być wysyłane na orbitę w postaci modułów, które następnie są łączone ze sobą już na orbicie. Zmontowanie takiej dużej struktury wymaga wykonania kilku zadań, takich jak: chwytanie modułów, łączenie ich, mocowanie lub skręcanie. Zastosowanie robotów kosmicznych w misiach serwisowych, jak i montażowych wydaje się idealnym rozwiązaniem - zwłaszcza, że mogą one pracować w nieprzyjaznym dla człowieka środowisku przez długi czas i są szczególnie przydatne, jeśli chodzi o wykonywanie powtarzalnych zadań.
Czytaj też: Gianfranco Visentin, szef robotyki ESA: "Droga do gwiazd wiedzie przez ciernie" [Space24 TV]
Najlepszym rozwiązaniem byłoby użycie robota wyposażonego w kilka manipulatorów współpracujących ze sobą. Sterowanie manipulatorem kosmicznym jest złożonym problemem, ze względu na mikrograwitację, ruch takiego manipulatora wpływa na pozycję oraz orientację satelity. Powstały w ten sposób pęd z kolei wpływa na pozycję i orientację członu roboczego manipulatora. W przypadku robota wyposażonego w kilka manipulatorów sytuacja jeszcze bardziej się komplikuje.
Naukowcy oraz inżynierowie z CBK PAN od wielu lat zajmują się konstrukcją manipulatorów kosmicznych oraz problematyką planowania trajektorii i sterowania robotem kosmicznym w warunkach orbitalnych. Opracowany został na przykład prototyp wielozadaniowego manipulatora satelitarnego WMS Lemur oraz dedykowany układ sterowania. Powstały również różne symulatory dedykowane robotyce orbitalnej, na których przeprowadzane były symulacje numeryczne, weryfikujące poprawność opracowanych algorytmów.
Ponadto CBK PAN posiada jedyne w Polsce stanowisko testowe, które pozwala na eksperymentalną weryfikację opracowanych algorytmów planowania trajektorii i sterowania robotem kosmicznym na płaszczyźnie. Robot kosmiczny, składający się z makiety satelity wyposażonej w redundantny manipulator, przemieszcza się na stole, korzystając z łożysk powietrznych, dzięki czemu symulowane są warunki mikrograwitacji. Dodatkowo, w nowo powstałym oddziale CBK PAN w Zielonej Górze, gdzie m.in. kontynuowane są prace związane z opracowaniem układów sterowania dla manipulatorów kosmicznych i ich wdrażaniem sprzętowym, w niedalekiej przyszłości powstanie specjalny „basen”, który również pozwoli symulować warunki mikrograwitacji. Należy dodać, że wiele projektów CBK PAN było realizowanych we współpracy z polskimi i zagranicznymi firmami.
Pracując nad robotyką, niezależnie od przeznaczenia pracy robota, pamiętać jednak należy zawsze o trzech prawach robotyki Asimova – robot nie może skrzywdzić człowieka, musi być posłuszny (o ile nie jest to sprzeczne z pierwszym prawem), musi chronić siebie samego (o ile nie jest to sprzeczne z pierwszym lub drugim prawem).
dr Fatina Liliana Basmadji, adiunkt
Laboratorium Mechatroniki i Robotyki Satelitarnej CBK PAN












