











- WIADOMOŚCI
- WYWIADY
Czy roboty zastąpią ludzi w kosmosie? [WYWIAD]

Autor. JAXA
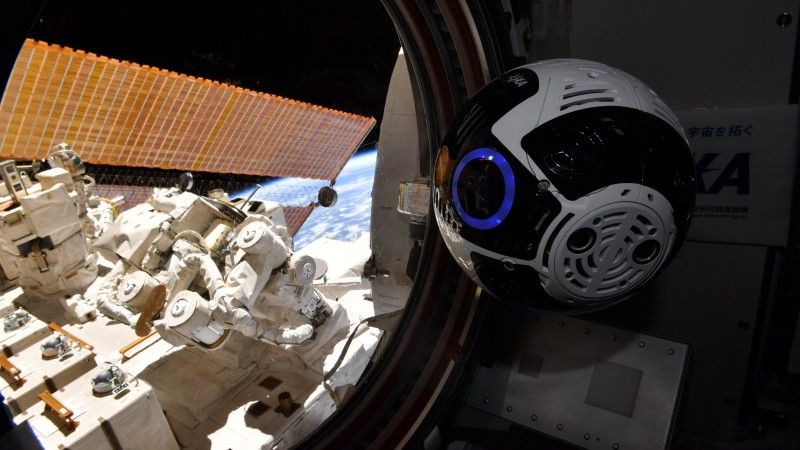
Roboty nie tylko wspierają astronautów na Międzynarodowej Stacji Kosmicznej, ale również inspirują młode pokolenie naukowców. Int-Ball2 – niewielki robot-fotograf opracowany przez japońską agencję kosmiczną JAXA – jest tego doskonałym przykładem. O robotyce kosmicznej opowiada naszej redakcji Seiko Piotr Yamaguchi, inżynier polskiego pochodzenia pracujący w JAXA i współtwórca Int-Ball2.
Wojciech Kaczanowski, redaktor Space24.pl: Robot Int-Ball2 to z założenia prosta konstrukcja. Do czego właściwie służy i skąd wziął się pomysł na jego budowę?
Seiko Piotr Yamaguchi, japońska agencja kosmiczna JAXA: Int-Ball2 to część większej wizji naszego zespołu, która zakłada wdrożenie systemów robotycznych, aby pomagały astronautom w obecnych misjach na Międzynarodową Stację Kosmiczną oraz w przyszłości na inne stacje, Księżyc oraz Mars. Praca na ISS opiera się w dużej mierze na astronautach. Daje nam to możliwość rozwijania kolejnych lotów i misji załogowych poprzez wprowadzanie modyfikacji oraz ulepszeń. Z drugiej strony pojawiają się ograniczenia związane, na przykład z czasem astronautów – to cenny zasób.
Jednym z głównych zadań na ISS jest prowadzenie badań naukowych. Na Ziemi chcemy monitorować te działania, a do tego potrzebujemy dobrej widoczności. Astronauta musi zatem ustawić kamerę w odpowiedni sposób, a to wymaga czasu. Głównym celem Int-Ball2 jest w tym przypadku wyręczenie naukowców z tego typu zadań, aby mogli przeznaczyć czas i swoją uwagę na naukę i eksperymenty.

Autor. JAXA
W 2017 roku wysłano na orbitę pierwszego robota Int-Ball – wtedy jeszcze nie byłem częścią zespołu JAXA – ale to doświadczenie dało nam solidne podstawy do zaprojektowania jego następcy, Int-Ball2. Dzięki temu nauczyliśmy się więcej o warunkach panujących na Międzynarodowej Stacji Kosmicznej oraz o tym, jak astronauci reagują na obecność robota i współpracują z nim. Jednym z kluczowych usprawnień w nowej wersji była możliwość automatycznego dokowania do specjalnej stacji ładującej.
Robot ma osiem wentylatorów, które – w zależności od tego, które są włączone – pozwalają mu się poruszać w różnych kierunkach i monitorować pracę astronautów z różnych perspektyw. Pierwszy Int-Ball miał w środku żyroskop, dzięki któremu się obracał, ale w obecnej wersji zrezygnowaliśmy z tego pomysłu. Int-Ball2 został przetestowany przez jednego z naszych astronautów na ISS w 2024 roku. Robot działa do dzisiaj i sprawuje się świetnie.
Int-Ball2 wydaje się prostą konstrukcją. Jak przebiegał proces jego budowy? Co stanowiło największe wyzwanie?
Int-Ball2 nie jest tak dużym projektem, jakie w JAXA są często prowadzone – rakiety, łazik na Księżyc, itp. Jednym z naszych celów było to, aby dość szybko w małym zespole przetestować wiele rzeczy. Japoński moduł na ISS działa już kilkanaście lat i dzięki temu możemy pozwolić sobie na próbowanie nowych eksperymentów. Robot powstał z elementów, które są dość łatwo dostępne – komputer można łatwo zakupić, a wentylatory/silniki są podobne do typowych rozwiązań dla dronów.
Najtrudniejszym zadaniem w projekcie było połączenie wszystkich elementów w jeden system, który będzie bezpieczny dla astronautów na stacji kosmicznej – obudowa, materiały i baterie nie mogą się zapalić, ani wytwarzać trujących gazów. To podstawa każdego projektu, który realizujemy w JAXA – bezpieczeństwo załogi. Drugim wyzwaniem były testy na Ziemi, ponieważ ten robot może lewitować jedynie w mikrograwitacji. Wykorzystywaliśmy symulacje komputerowe lub narzędzie dostępne w laboratorium, ale dopiero środowisko na ISS weryfikuje naszą pracę. Przykładowo, gdy wysłaliśmy pierwszą wersję Int-Ball okazało się, że klimatyzacja lub ruchy astronautów są dość problematyczne dla poruszania się robota. Musieliśmy to uwzględnić w Int-Ball2.
Loty załogowe - nawet te na niską orbitę okołoziemską - niosą ze sobą ryzyko dla astronautów. W jaki sposób roboty, takie jak Int-Ball2 i inne, pomagają astronautom w kosmosie?
Międzynarodowa Stacja Kosmiczna to bezpieczne miejsce dla astronautów przebywających w środku – mogą pracować bez skafandrów i są zapewnione podstawowe zasoby. Zawsze ryzykiem są spacery kosmiczne (ang. Extravehicular Activity), które wymagają odpowiedniego przygotowania na Ziemi i stacji kosmicznej. W tym procesie pomaga właśnie robotyka. Przykładowo japoński moduł na ISS - Kibo – jest wyposażony w specjalne ramię JEMRMS (Japanese Experiment Module Remote Manipulator System), którym możemy przesuwać i przekładać różne rzeczy.

Autor. JAXA
Na początku astronauci sami sterowali robotami na pokładzie ISS. Słyszałem historie, że jedna osoba obsługiwała joystick, a druga patrzyła przez okno, żeby zobaczyć, co się dzieje na zewnątrz (śmiech). Sterowanie przez astronautów wciąż się zdarza - na przykład w przypadku ramienia Canadarm2 i dokowania statków kosmicznych. Japoński moduł ma z kolei swoje własne ramię, JEMRMS, które początkowo również było obsługiwane przez astronautów na miejscu. Dziś jednak sterujemy nim z Ziemi.
Dodatkowo moduł Kibo jest wyposażony w śluzę (ang. airlock), w której astronauci umieszczają kamery do obserwowania Ziemi lub inne eksperymenty. Tego typu narzędzia ograniczają ryzyko dla astronautów podczas wychodzenia oraz ich czas.
Praca w młodym wieku przy robocie, który ma polecieć na Międzynarodową Stację Kosmiczną wydaje się wyzwaniem. Jak tego typu projekty mogą inspirować młode pokolenie studentów i naukowców?
Inspirowanie to również jedno z zadań pozornie niedużych robotów. Projekt Int-Ball2 od początku miał zintegrować małą grupę młodych inżynierów, aby zdobyli doświadczenie i wiedzę. Rozwój tego typu robota, pokonywanie barier to część procesu kształcenia kadr na przyszłość.
Większość agencji kosmicznych na świecie, takich jak NASA czy Europejska Agencja Kosmiczna, korzysta z pomocy firm zewnętrznych przy opracowywaniu technologii. Następnie jedna z nich odpowiada za integrację zbudowanych podsystemów w jeden spójny mechanizm. W przypadku Int-Ball2 za połączenie wszystkich elementów w całość odpowiadał zespół, w którego skład wchodziłem ja oraz kilku młodych pracowników JAXA, wspieranych przez mentorów, z którymi pracuję również przy bardziej zaawansowanych projektach. W krótkim okresie możemy dużo nauczyć się na własnych błędach. To ma olbrzymią wartość w karierze naukowej.
Duży nacisk kładziemy również na „udostępnianie” robota studentom i sektorowi prywatnemu. JAXA prowadzi różnego rodzaju programy i konkursy skierowane do uczniów, w ramach których mogą oni programować Int-Ball2. Zespoły rywalizują ze sobą na Ziemi, wykorzystując symulatory, w różnych kategoriach — na przykład: kto szybciej odnajdzie wskazany obiekt na pokładzie ISS. Najlepsze zespoły mają możliwość odtworzenia swojego oprogramowania na prawdziwym robocie znajdującym się na Międzynarodowej Stacji Kosmicznej.
Czujesz się częścią japońskiej załogi na Międzynarodowej Stacji Kosmicznej?
Zdecydowanie tak! ISS jest super, bo angażuje nie tylko zespół z Japonii, ale również z innych państw. W kontekście robotyki, na stacji są również roboty z NASA i ESA. Współpraca międzynarodowa daje uczucie, że wszyscy należymy do jednego teamu. To rozwija nasze umiejętności i relacje międzyludzkie.
Skoro roboty są tak pomocne w kosmosie, zwłaszcza jeśli chodzi o zwiększanie bezpieczeństwa astronautów, to czy w przyszłości mogą całkowicie zastąpić ludzi w misjach kosmicznych? Co by to oznaczało dla załogowych lotów na Księżyc czy Marsa?
Księżyc i Mars to miejsca, gdzie faktycznie o bezpieczeństwo astronautów będzie trudniej zadbać. Ograniczona jest również liczba miejsc w statkach kosmicznych, więc niezbędny będzie odpowiedni dobór załogi. W przypadku ISS przede wszystkim czas powrotu na Ziemię jest zdecydowanie krótszy. Zapotrzebowanie na robotykę naszym zdaniem rośnie. Właśnie dlatego testujemy tego typu systemy na ISS, aby łatwiej je było wdrażać do bardziej wymagających misji.
Myślę, że w przyszłości roboty nie zastąpią w pełni ludzi w kosmosie. Na przykład jeśli wyślemy na Księżyc łazik, to będziemy go mogli zmienić tylko w poszczególnych kwestiach, np. software. Astronauta będzie mógł jednak lepiej się przystosować i wykonywać zadania, również te nieplanowane, bardziej dynamicznie. Obecność ludzi - ich samopoczucie, podejmowane decyzje – jest wartością dla misji. Oczywiście roboty nie zmęczą się, a ich utrata nie będzie tak bolesna. Myślę jednak, że niezbędna będzie integracji misji robotycznych z załogowymi. Tam, gdzie zadanie może być niebezpieczne dla astronauty wyślemy robota. Pozostałe zadania powinny przypaść astronautom.
Loty załogowe są również lepsze pod względem PRu i stymulacji sektora kosmicznego w danym kraju. Już niedługo astronauta projektowy – dr Sławosz Uznański-Wiśniewski – poleci na Międzynarodową Stację Kosmiczną, co pewnie wpłynie na zwiększone zainteresowanie kosmosem, nauką i nowymi technologiami w Polsce. Trzymam za to kciuki!
Dziękuję za rozmowę!












