











- WIADOMOŚCI
Koniec prac nad polskim układem sterowania manipulatora satelitarnego
Eksperci przewidują, że w ciągu najbliższej dekady rozwinie się rynek usług orbitalnego serwisowania satelitów. Największe firmy działające w branży kosmicznej prowadzą obecnie prace nad bezzałogowymi satelitami serwisowymi, które mogłyby być wykorzystywane do naprawiania, tankowania oraz przenoszenia na inne orbity satelitów komercyjnych, a także do przechwytywania i usuwania z orbity kosmicznych śmieci. Problem śmieci kosmicznych znajduje się w centrum zainteresowania Europejskiej Agencji Kosmicznej, ale nie tylko. Układ sterowania przygotowany przez naukowców i inżynierów z Centrum Badań Kosmicznych PAN w trakcie realizacji projektu „Opracowanie i walidacja układu sterowania manipulatora satelitarnego” (SpaRoC) spełnia wymagania wynikające z realnych potrzeb powstającego rynku.
Prace nad projektem SpaRoC, prowadzonym przez dr. inż. Tomasza Rybusa z Laboratorium Mechatroniki i Robotyki Satelitarnej CBK PAN, zakończyły się w czerwcu bieżącego roku. SpaRoC był finansowany przez Narodowe Centrum Badań i Rozwoju w ramach X edycji Programu LIDER. Opracowane rozwiązania mają duży potencjał wdrożeniowy, a układ sterowania bądź jego elementy mogą znaleźć zastosowanie w planowanych misjach kosmicznych.
![Ilustracja: Sieć Badawcza Łukasiewicz-PIMR [pimr.eu]](https://cdn.defence24.pl/2020/09/04/1920xpx/2020/09/04/originals/opBAm9qjGelSgrFoeyuTrHZ2DeH6JM8GcfGsZkt6.ihm4.jpg)
Zadaniem opracowanego układu sterowania jest kontrola mechanicznego ramienia, które w przyszłości będzie mogło zostać umieszczone na bezzałogowym satelicie wykonującym orbitalne misje serwisowe oraz przechwytującym śmieci kosmiczne. Układ sterowania złożony jest z trzech modułów: planowania trajektorii, realizacji trajektorii oraz filtracji i fuzji danych pomiarowych. Moduł planowania trajektorii, jak nazwa wskazuje, odpowiada za zaplanowanie ruchu manipulatora, a więc ścieżki, po której ma się on poruszać w trakcie przechwytywania uszkodzonego satelity. Moduł ten oparto na innowacyjnych algorytmach, pozwalających na zaplanowanie bezkolizyjnych trajektorii. Wykorzystano między innymi algorytm Obstacle Vector Field (OVF), który został opracowany przez kierownika projektu w trakcie stażu podoktorskiego na Wydziale Elektroniki Politechniki Wrocławskiej. Moduł realizacji trajektorii odpowiada za sterowanie manipulatorem w trakcie wykonywania ruchu.
Tu zastosowano algorytm sterowania oparty na Jakobianie Kinematycznym ze sprzężeniem od prędkości satelity. Takie rozwiązanie zapewnia dokładność realizacji trajektorii zbliżoną do rozwiązania klasycznego opartego na Jakobianie Dynamicznym. W porównaniu z rozwiązaniem klasycznym, opracowany algorytm cechuje się znacząco mniejszą złożonością obliczeniową, co jest niezwykle istotne w kontekście możliwości implementacji tego rozwiązania na komputerze pokładowym satelity serwisowego. Trzeci moduł układu sterowania odpowiadający za filtrację i fuzję danych pomiarowych, pozwala na zmniejszenie wpływu zakłóceń działających na układ i umożliwia realizację ruchu manipulatora z wyższą dokładnością dzięki wykorzystaniu danych z kilku różnych czujników.
![Ilustracja: Polska Agencja Kosmiczna [polsa.gov.pl]](https://cdn.defence24.pl/2021/09/28/1920xpx/2021/09/28/originals/w02uY6EaOfFJPIV5gZyJZw6AlwZEFxofZw8klAFe.buyt.jpg)
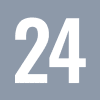
Działanie opracowanego układu sterowania zostało zbadane w symulacjach numerycznych, a walidację przeprowadzono na unikalnym stanowisku testowym w CBK PAN. Stanowisko to wykorzystuje płaskie łożyska powietrzne do symulacji warunków mikrograwitacji. W ramach projektu zaprojektowano i zbudowano chwytak oraz makietę satelity-celu, co znacząco poszerzyło możliwości stanowiska testowego. Układ sterowania został zaimplementowany w języku C na komputerze pokładowym istniejącej makiety satelity serwisowego. W symulowanych warunkach mikrograwitacji przeprowadzono demonstrację manewru przechwycenia: chwytak umieszczony na końcu manipulatora złapał obracającą się z zadaną prędkością makietę satelity-celu. Sterowanie manipulatorem w trakcie manewru oparto na opracowanym układzie sterowania.
Zrealizowane testy pozwoliły na ocenę możliwości praktycznego zastosowania układu sterowania oraz porównanie zastosowanych algorytmów z innymi metodami sterowania. Była to pierwsza w Polsce demonstracja realizacji manewru przechwycenia satelity z wykorzystaniem manipulatora przeprowadzona w symulowanych warunkach mikrograwitacji. Na zakończenie projektu udało się osiągnąć piąty poziom gotowości technologicznej (TRL), który wymagał zweryfikowania komponentów opracowanej technologii w środowisku zbliżonym do rzeczywistego oraz ich integracji z rzeczywistymi elementami wspomagającymi.

Układ sterowania, który powstał w trakcie realizacji projektu SpaRoC, oparty jest na nowatorskich rozwiązaniach. W trakcie prac nad tym układem otrzymano bardzo ciekawe wyniki naukowe, które zostały przedstawione w trzech artykułach opublikowanych w prestiżowych czasopismach. Wyniki projektu były także prezentowane na międzynarodowych i krajowych konferencjach naukowych, m.in., na konferencji International Conference on Informatics in Control, Automation and Robotics (ICINCO) oraz na 4th Conference on Aerospace RObotics (CARO’4). Ponadto, trzech członków zespołu badawczego ze SpaRoCa zostało laureatami VII edycji konkursu stażowego „Polish Space Fellowship Program” organizowanego przez Agencję Rozwoju Przemysłu S.A. oraz Związek Pracodawców Sektora Kosmicznego.
Wyniki otrzymane podczas początkowej fazy projektu SpaRoC zostały również wykorzystane w innym projekcie finansowanym przez Europejską Agencję Kosmiczną, realizowanym przez konsorcjum przemysłowe, którego liderem jest firma PIAP Space Sp. z o.o.
Projekt „Opracowanie i walidacja układu sterowania manipulatora satelitarnego” finansowany był przez Narodowe Centrum Badań i Rozwoju w ramach umowy nr LIDER/19/0117/L-10/18/NCBR/2019. W ramach programu LIDER finansowane są projekty naukowe, których wyniki mogą być wykorzystane w gospodarce.

Źródło: Centrum Badań Kosmicznych Polskiej Akademii Nauk












