











- WIADOMOŚCI
Polski Lemur wyłapie kosmiczne śmieci
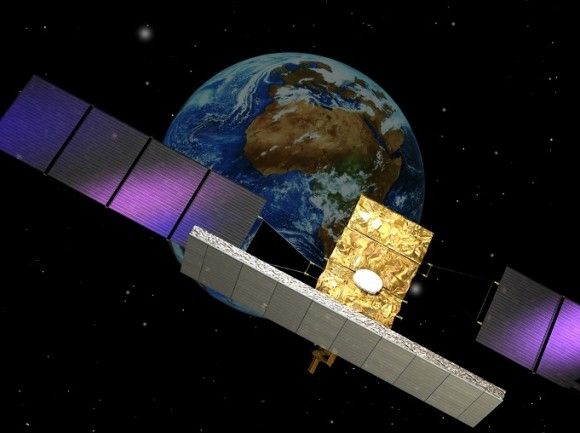
Wizja usuwania nieczynnego satelity z orbity, Ilustracja: ESA/Mixed-Reality Communication GmbH
Lemur – robotyczne ramię budowane przez polskich naukowców – będzie mogło wyłapywać z kosmosu duże kosmiczne śmieci, np. nieczynne satelity. W przyszłości ma się również przydać się do serwisowania ISS, satelitów telekomunikacyjnych czy budowy laboratoriów orbitalnych.
Problem kosmicznych śmieci
Na orbicie okołoziemskiej znajdują się już tysiące kosmicznych śmieci. Powstają one np. w efekcie nieplanowanego zderzenia satelitów poruszających się po zbliżonej trajektorii. Po zderzeniu rosyjskiego satelity z satelitą konstelacji Iridium powstało ponad trzy tysiące kawałków. Część kosmicznych śmieci stanowią elementy nośne rakiet wynoszących obiekty na orbitę okołoziemską, inne - to nieczynne już satelity, a nawet przedmioty pozostawione w kosmosie przez astronautów: rękawiczka zgubiona przez astronautę Eda White'a albo worki z prawdziwymi śmieciami z radzieckiej stacji Mir.
Takie nieużyteczne, krążące po orbitach satelity stanowią zagrożenie dla infrastruktury orbitalnej - np. misji monitorujących środowisko ziemskie czy misji kosmicznych. "Nawet małe kosmiczne śmieci - rzędu 5 cm - lecą z prędkością kilku kilometrów na sekundę. To znacznie więcej niż prędkość kuli wystrzelonej z karabinu, co powoduje, że mogą z łatwością uszkodzić inne pracujące satelity. Jeszcze większym zagrożeniem są duże, pozbawione kontroli satelity" - mówi dr inż. Karol Seweryn z Centrum Badań Kosmicznych PAN.
Jednym z największych kosmicznych śmieci jest satelita Envisat nieczynny od 2009 roku. Jego usunięcie to bardzo ambitna misja, bo obiekt ma 8 metrów długości i waży 8 ton. Ponadto porusza się bardzo skomplikowanym ruchem obrotowym, co komplikuje manewr przechwycenia tego obiektu. Europejska Agencja Kosmiczna planuje pozbyć się tego kłopotliwego satelity w 2022 roku. Pomysłów na jego usunięcie jest kilka.
Jednym z nich jest złapanie satelity za pomocą robotycznego ramienia, umieszczonego na tzw. satelicie serwisowym. W praktyce cała operacja wyglądałaby tak: satelita serwisowy zbliża się do kosmicznego złomu, rozpoznaje jego ruch z wykorzystaniem systemów optoelektronicznych, a następnie dopasowuje swoje względne położenie i orientację, tak aby umożliwić bezpieczne działanie ramienia robotycznego. Finalnym etapem jest ruch manipulatora po specjalnej trajektorii zapewniającej bezpieczne chwycenie obiektu i jego późniejszą stabilizację.
Projekt ORCO z udziałem polskich naukowców
Nad przygotowaniem takiego manewru pracuje międzynarodowy zespół naukowców i inżynierów. Projekt kierowany jest przez hiszpańską firmę GMV, a partnerami są firmy włoskie, portugalskie oraz Centrum Badań Kosmicznych PAN z Warszawy. Projekt o nazwie ORCO realizowany jest na zlecenie Europejskiej Agencji Kosmicznej.
Jednym z ważniejszych elementów prowadzonych prac jest wspomniany Lemur - robotyczne ramię, przygotowane przez naukowców z Centrum Badań Kosmicznych PAN. Umożliwi ono przeprowadzenie kluczowego manewru misji: złapanie kosmicznego śmiecia. "Zamontowany na manipulatorze chwytak złapałby nieczynnego satelitę za obręcz, którą kiedyś był on umocowany do rakiety wynoszącej go w przestrzeń kosmiczną. Tak złowionego satelitę można później unieszkodliwić" - mówi PAP twórca manipulatora dr inż. Karol Seweryn z CBK PAN.
Choć nie brzmi to skomplikowanie, całe przedsięwzięcie wymaga wielu symulacji i niezwykłej precyzji. "Najpierw musimy zidentyfikować obiekt odległy od nas o wiele kilometrów, aby wiedzieć, jak się on porusza i rotuje w kosmosie. Z jego ruchem należy zsynchronizować ruch satelity, który ma się zbliżać do kosmicznego śmiecia i złapać go, minimalizując ryzyko zderzenia. W przypadku kolizji - zamiast pomóc - możemy bowiem przyczynić się do powstania wielu kolejnych kosmicznych śmieci. Układ sterowania satelity wraz z ramieniem robotycznym jest wyzwaniem dla zespołu pracującego w projekcie ORCO" - zaznacza w rozmowie z PAP kierujący projektem ORCO - Pablo Colmenarejo z GMV.
Kosmiczne ramię do usuwania śmieci z orbity
Naukowcy zajmują się m.in. interakcją pomiędzy robotycznym ramieniem - a usuwanym satelitą. Szczególnie interesuje ich moment kontaktu między tymi obiektami. "Za każdym razem, gdy robotyczne ramię dotyka łapanego obiektu, wytwarza to konkretne siły i wpływa na drugi obiekt" - wyjaśnia Colmenarejo. "Nasze robotyczne ramię powinno być na tyle stabilne, aby przez kilka sekund mogło dotknąć nieużywanego satelity, nie powodując odepchnięcia obiektów od siebie. Właśnie w tym czasie chwytak mógłby złapać kosmiczny śmieć" - wtóruje mu dr Seweryn.
Robotyczne ramię mogłoby wyłapywać zwłaszcza większe obiekty, np. wspomnianego satelitę Envisat. "Używanie go do usuwania mniejszych obiektów nie ma większego sensu. W tym przypadku lepsze byłoby zastosowanie innego rozwiązania, np. siatki" - sugeruje dr Seweryn.
"Siatka jest dobrym systemem, bo nie musi znaleźć się aż tak blisko łapanego obiektu, nie ma też kwestii synchronizacji ruchu satelity z ruchem kosmicznego śmiecia. Problem jest jednak taki, że jeśli siatka złapie i oplecie kosmiczny obiekt, to zaczyna wraz z nim wirować. Ten proces trudno jest jednak kontrolować. To mogłoby być szczególnie niebezpieczne w przypadku zarzucenia siatki na duży obiekt, jakim jest np. Envisat. Robotyczne ramię jest bardziej przewidywalne i w znacznie większym stopniu pozwala kontrolować proces łapania śmiecia" - mówi Pablo Colmenarejo.
Lemur, nad którym pracują Polacy, to demonstrator technologii. Gdyby Europejska Agencja Kosmiczna zdecydowała się na łapanie dużych kosmicznych śmieci właśnie z jego pomocą – do dyspozycji będzie już przetestowana technologia, którą można rozwijać z wykorzystaniem środków narodowych agencji kosmicznych czy środków ESA. W przyszłości Lemur mógłby posłużyć np. serwisowania Międzynarodowej Stacji Kosmicznej - ISS, satelitów telekomunikacyjnych czy montażu i budowy laboratoriów orbitalnych.
Czytaj też: Chwytak PIAP pomoże usunąć niesprawne satelity z orbity?













